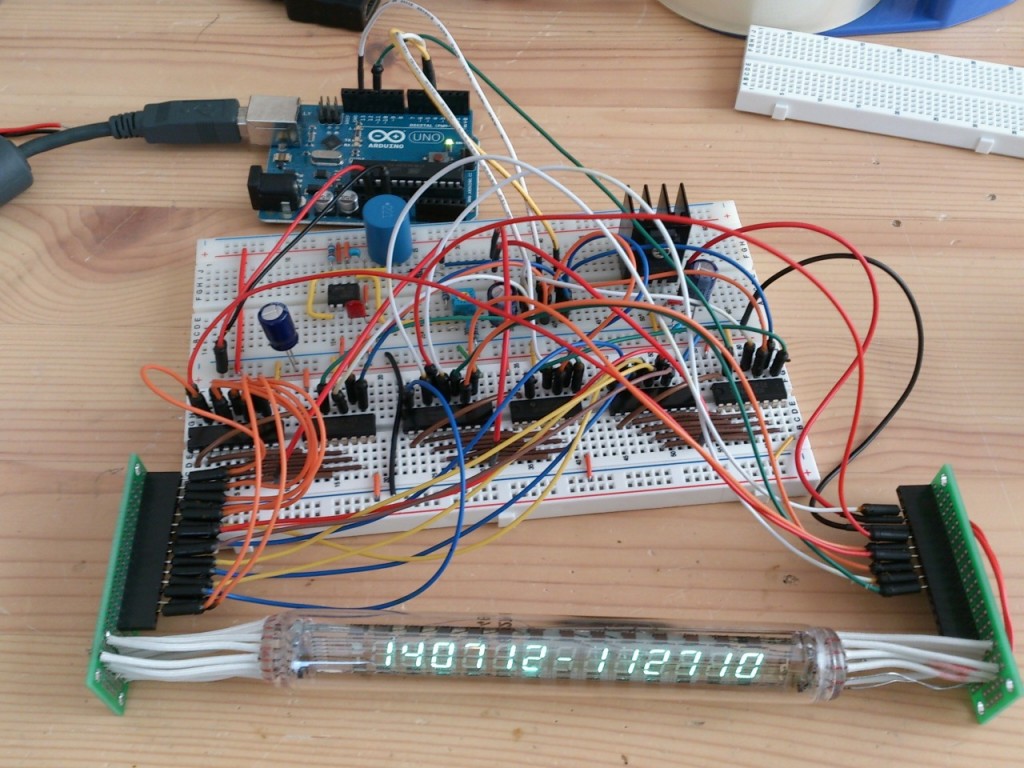
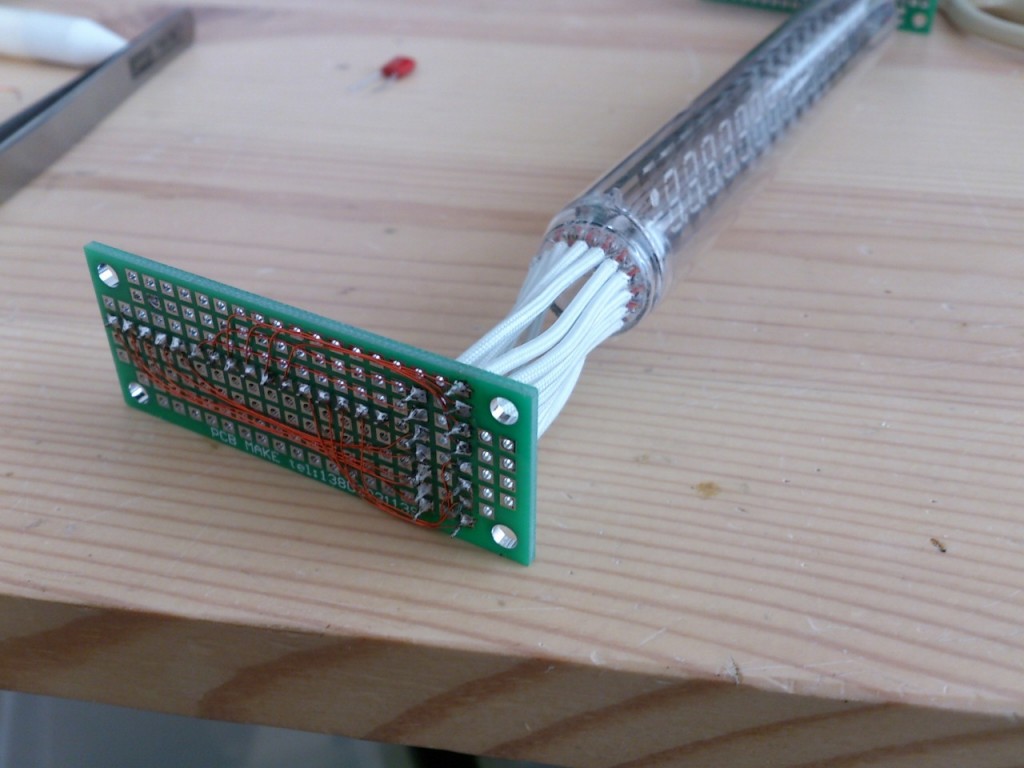
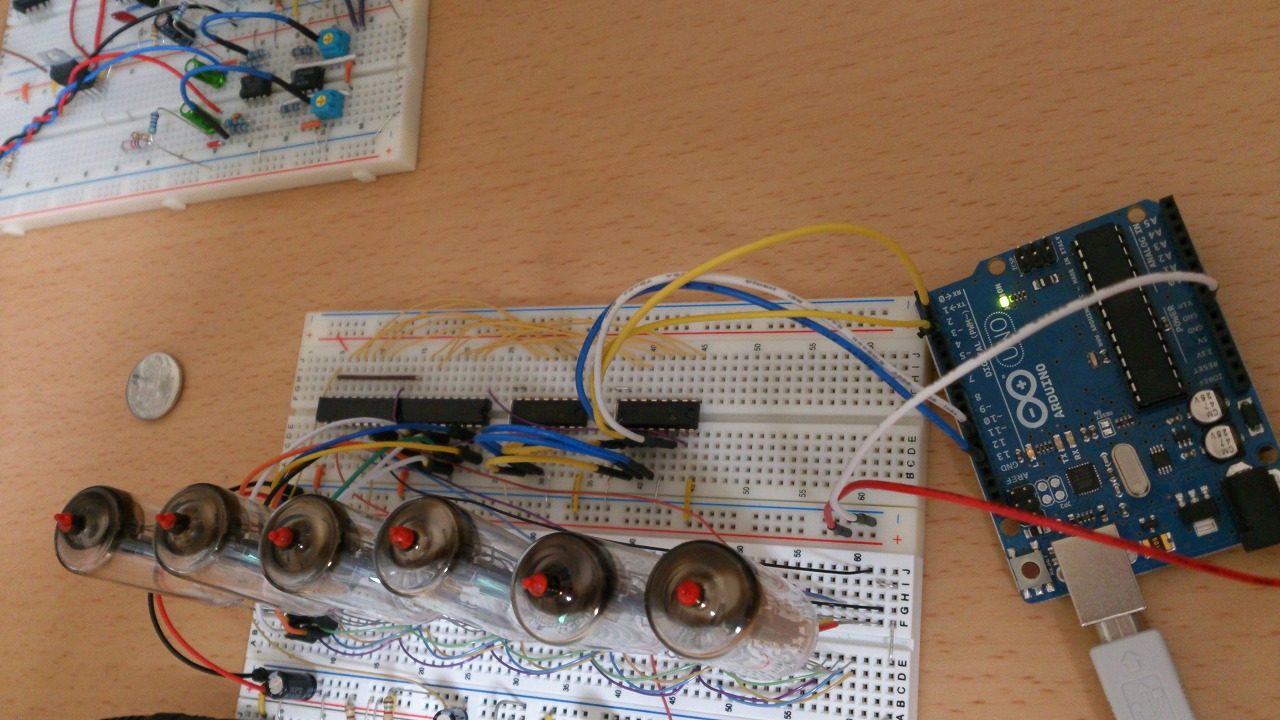
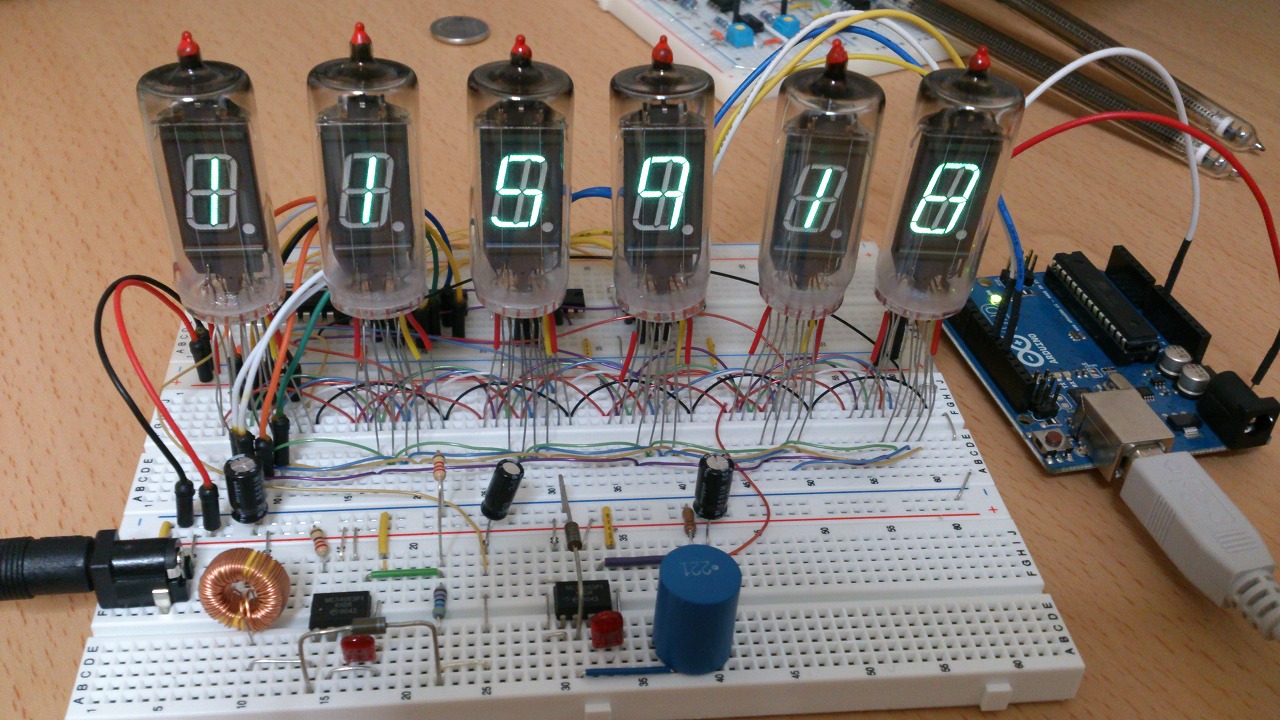
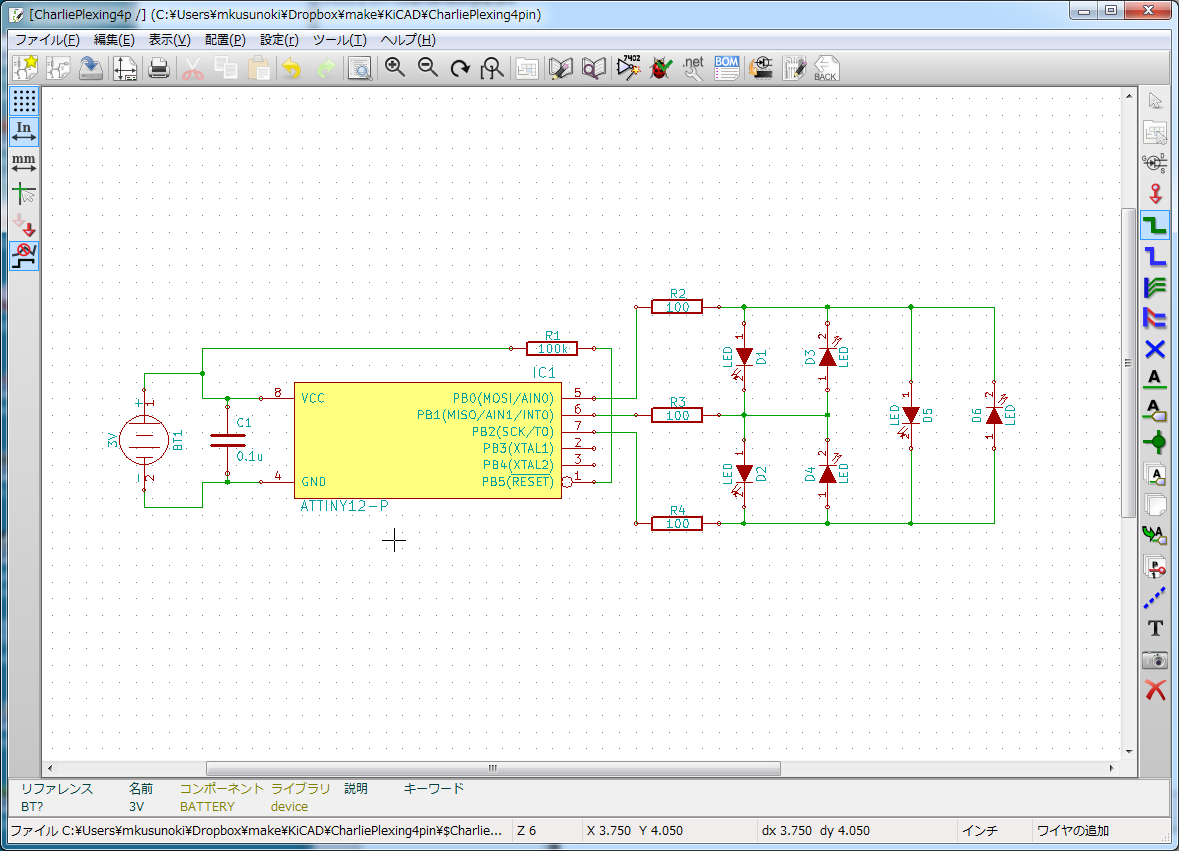
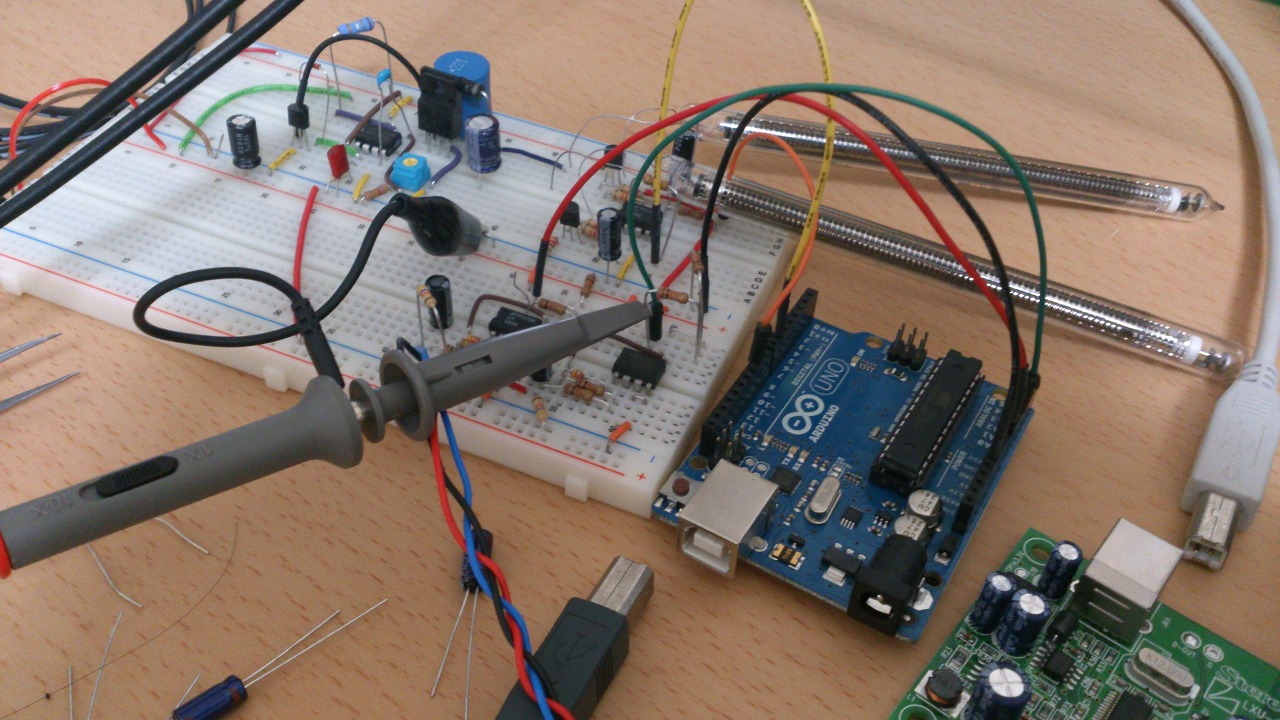
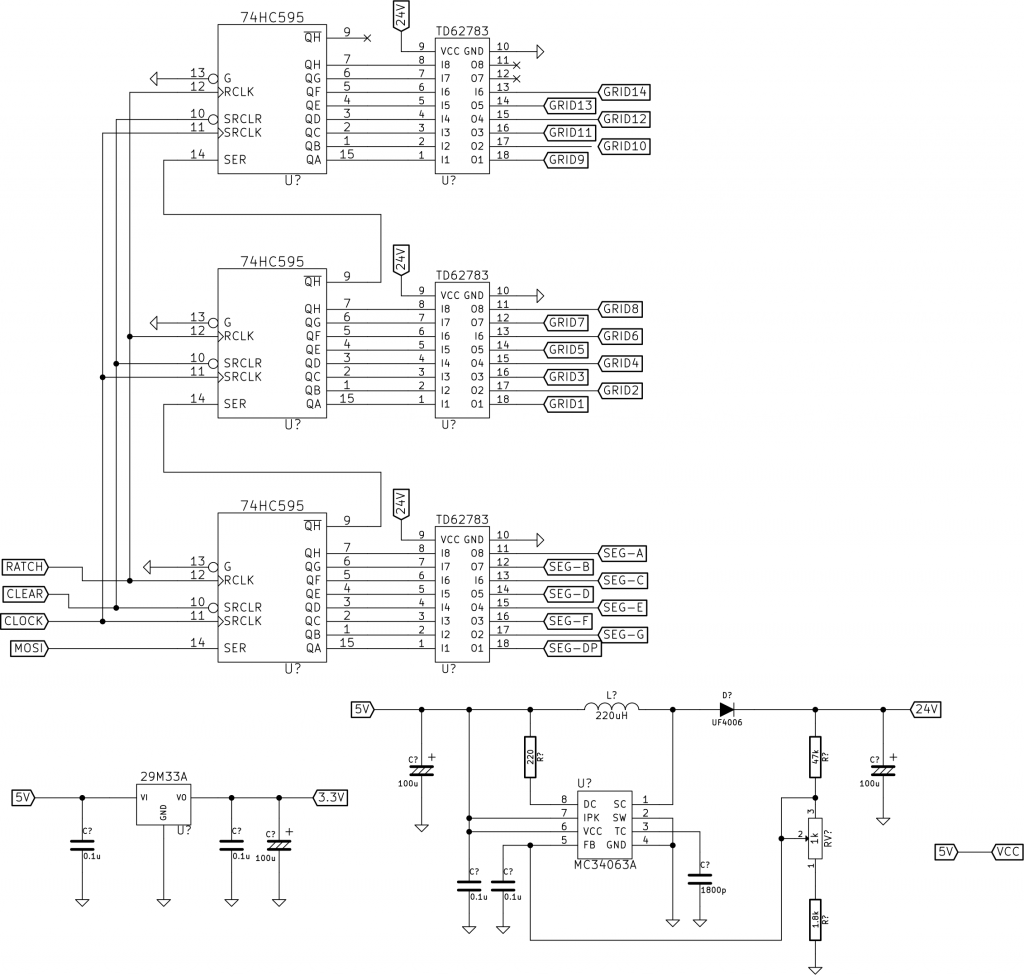
土曜日に基本の点灯まで行いました IV-27M 蛍光表示管ですが、シフトレジスタにデータ流す順番とかの整理もかねて配線を一部やりなおしました。とりあえずブレッドボードに乗っている部品から下記の回路図を書き出しもしました。
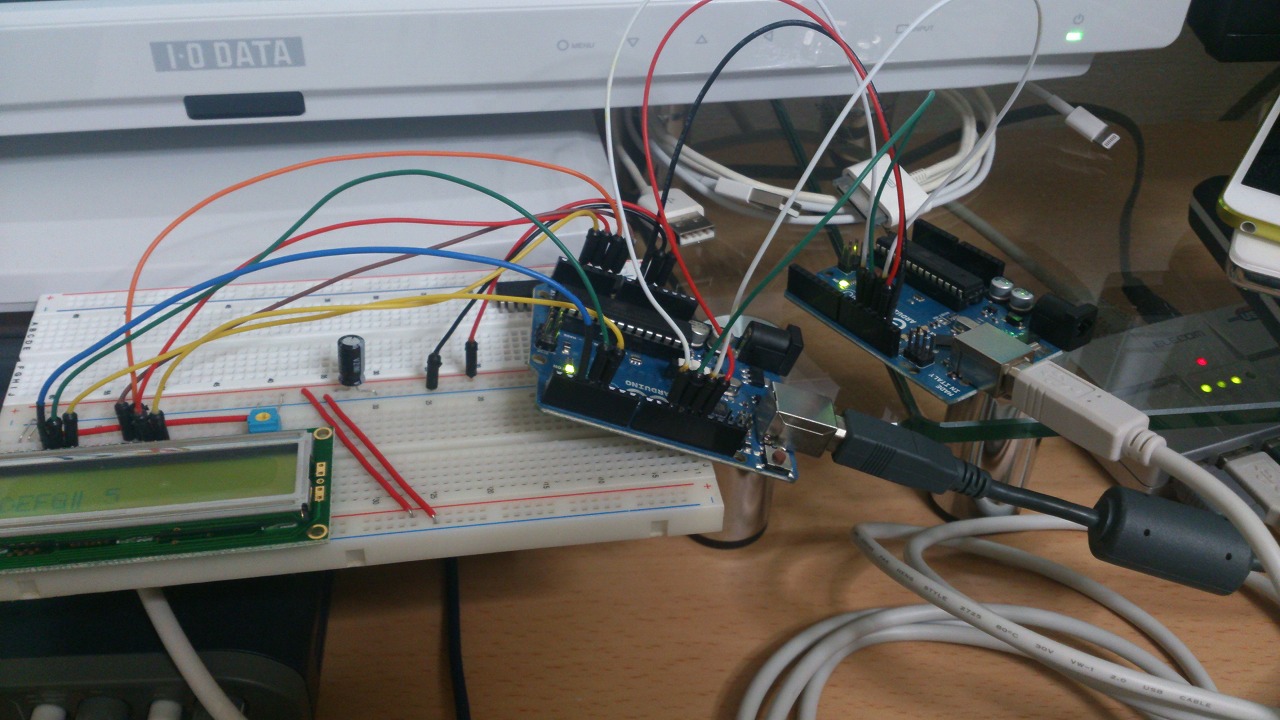
これに、Arduino UNO を接続しまして、シリアルポートから受信した数字を表示するようにプログラムを作成。これは、仕込んでおきたかった機能で、ゴースト確認用に数文字おきに表示とかしたいときなど便利です。
24V ではブランキングタイム入れてない状態でもゴーストほとんど出てないですが、24V の電源をもう少しあげてみたらハッキリ出るかも知れないので、一応ということです。
[vine url=”https://vine.co/v/MxXXwtDiqDg”]
#include <SPI.h>
#include <stdio.h>
#include <string.h>
/* ------------------------------------------------------------
-- Grobal Variables
------------------------------------------------------------ */
unsigned int msCount = 0;
boolean msCountOVF;
unsigned char vfdDigit = 0;
unsigned char vfdSeg[14];
unsigned char vfdDot[14];
char str01[20];
String inputString = ""; // a string to hold incoming data
boolean stringComplete = false; // whether the string is complete
/* ------------------------------------------------------------
-- Interrupt hundler (every 0.5ms)
------------------------------------------------------------ */
ISR(TIMER2_COMPA_vect) {
sendVfd();
msCount++;
if(msCount >= 2000) { // 1seconds
msCount = 0;
msCountOVF = true;
}
// Reset interrupt flag and counter.
TIFR2 &= ~(1<<OCF2A);
}
/* ------------------------------------------------------------
-- Initial Setup
------------------------------------------------------------ */
void setup() {
pinMode(4, OUTPUT); // SCLR
pinMode(5, OUTPUT); // RCK
// initialize SPI
SPI.begin();
SPI.setClockDivider(SPI_CLOCK_DIV2);
SPI.setDataMode(SPI_MODE0);
SPI.setBitOrder(MSBFIRST);
//
Serial.begin(9600);
// Setup TIMER2
// a. Disable the Timer/Counter2 interrupts by clearing OCIE2x and TOIE2.
// b. Select clock source by setting AS2 as appropriate.
// c. Write new values to TCNT2, OCR2x, and TCCR2x.
// d. To switch to asynchronous operation: Wait for TCN2xUB, OCR2xUB, and TCR2xUB.
// e. Clear the Timer/Counter2 Interrupt Flags.
// f. Enable interrupts, if needed.
// TIMSK2 2=OCIE2B 1=OCIE2A 0=TOIE2
// Disable interrupt enable
TIMSK2 &= ~(1<<OCIE2B);
TIMSK2 &= ~(1<<OCIE2A);
TIMSK2 &= ~(1<<TOIE2);
// ASSR – Asynchronous Status Register
// 6=EXCLK 5=AS2 4=TCN2UB 3=OCR2AUB 2=OCR2BUB 1=TCR2AUB 0=TCR2BUB
// AS2=0 CLKIO, AS2=1 TOSC1
ASSR &= ~(1<<AS2);
// Waveform Generation Mode set to NORMAL mode WGM22,21,20=0
TCCR2A &= ~(1<<WGM20);
TCCR2A |= (1<<WGM21);
TCCR2B &= ~(1<<WGM22);
// TCCR2B – Timer/Counter Control Register B
// 7=FOC2A 6=FOC2B 3=WGM22 2=CS22 1=CS21 0=CS20
// CS22 CS21 CS20 Description
// 0 0 0 No clock source (Timer/Counter stopped).
// 0 0 1 clkT2S/(No prescaling)
// 0 1 0 clkT2S/8 (From prescaler)
// 0 1 1 clkT2S/32 (From prescaler)
// 1 0 0 clkT2S/64 (From prescaler)
// 1 0 1 clkT2S/128 (From prescaler)
// 1 1 0 clkT2S/256 (From prescaler)
// 1 1 1 clkT2S/1024 (From prescaler)
TCCR2B |= (1<<CS22);
TCCR2B &= ~(1<<CS21);
TCCR2B &= ~(1<<CS20);
TCNT2 = 0;
OCR2A = 124; // 16MHz / 64 = 4us. 4us * 125 = 0.5ms
// Clear interrupt flag
// TIFR2 – Timer/Counter2 Interrupt Flag Register
// 2=OCF2B 1=OCF2A 0=TOV2
TIFR2 &= ~(1<<OCF2A);
// TIMSK2 2=OCIE2B 1=OCIE2A 0=TOIE2
// Enable interrupt
TIMSK2 |= (1<<OCIE2A);
}
/* ------------------------------------------------------------
-- Main loop
------------------------------------------------------------ */
void loop() {
int i;
int charLen;
// serial input done
// 9600 bps
// help[RET] -> print help message
// HH MM SS[RET] -> set time
//
if (stringComplete == true) {
//Serial.println(inputString);
if(inputString.equals("help\r")) {
Serial.println("help: I'm alive");
}
else {
for(i = 0; i < 14; i++) {
vfdSeg[i] = 0;
str01[i] = 0;
}
charLen = inputString.length();
if(charLen > 15) {
charLen = 15;
}
inputString.toCharArray(str01, charLen);
for(i = 0; i < 14; i++) {
convVfdSeg(i);
}
}
inputString = "";
stringComplete = false;
}
}
/* ------------------------------------------------------------
-- sendVfd
------------------------------------------------------------ */
void sendVfd() {
unsigned int vfdBit;
unsigned char vfdBitH;
unsigned char vfdBitL;
// HC595 SCLR(negedge: shift register clear)
digitalWrite(4,LOW);
digitalWrite(4,HIGH);
// HC595 RCK (posedge: data latch)
digitalWrite(5,LOW);
digitalWrite(5,HIGH);
// send to shift register
vfdBit = (1 << vfdDigit);
vfdBitL = vfdBit & 0x00FF;
vfdBitH = (vfdBit >> 8);
//if(vfdDot[vfdDigit] != 0) {
// digit |= 0x80;
// }
SPI.transfer(vfdBitH);
SPI.transfer(vfdBitL);
SPI.transfer(vfdSeg[vfdDigit]);
// HC595 RCK (posedge: data latch)
digitalWrite(5,LOW);
digitalWrite(5,HIGH);
vfdDigit++;
if(vfdDigit > 13) {
vfdDigit = 0;
}
}
/* ------------------------------------------------------------
-- sendVfd
------------------------------------------------------------ */
void convVfdSeg(int digit) {
switch(str01[digit]) {
case '0':
vfdSeg[digit] = 0xFC;
break;
case '1':
vfdSeg[digit] = 0x60;
break;
case '2':
vfdSeg[digit] = 0xda;
break;
case '3':
vfdSeg[digit] = 0xf2;
break;
case '4':
vfdSeg[digit] = 0x66;
break;
case '5':
vfdSeg[digit] = 0xb6;
break;
case '6':
vfdSeg[digit] = 0xbe;
break;
case '7':
vfdSeg[digit] = 0xe0;
break;
case '8':
vfdSeg[digit] = 0xfe;
break;
case '9':
vfdSeg[digit] = 0xe6;
break;
case '-':
vfdSeg[digit] = 0x02;
break;
}
}
/*
SerialEvent occurs whenever a new data comes in the
hardware serial RX. This routine is run between each
time loop() runs, so using delay inside loop can delay
response. Multiple bytes of data may be available.
*/
void serialEvent() {
while (Serial.available()) {
// get the new byte:
char inChar = (char)Serial.read();
// add it to the inputString:
inputString += inChar;
Serial.write(inChar);
// if the incoming character is a newline, set a flag
// so the main loop can do something about it:
if (inChar == '\r') {
stringComplete = true;
Serial.write('\r');
Serial.write('\n');
}
}
}