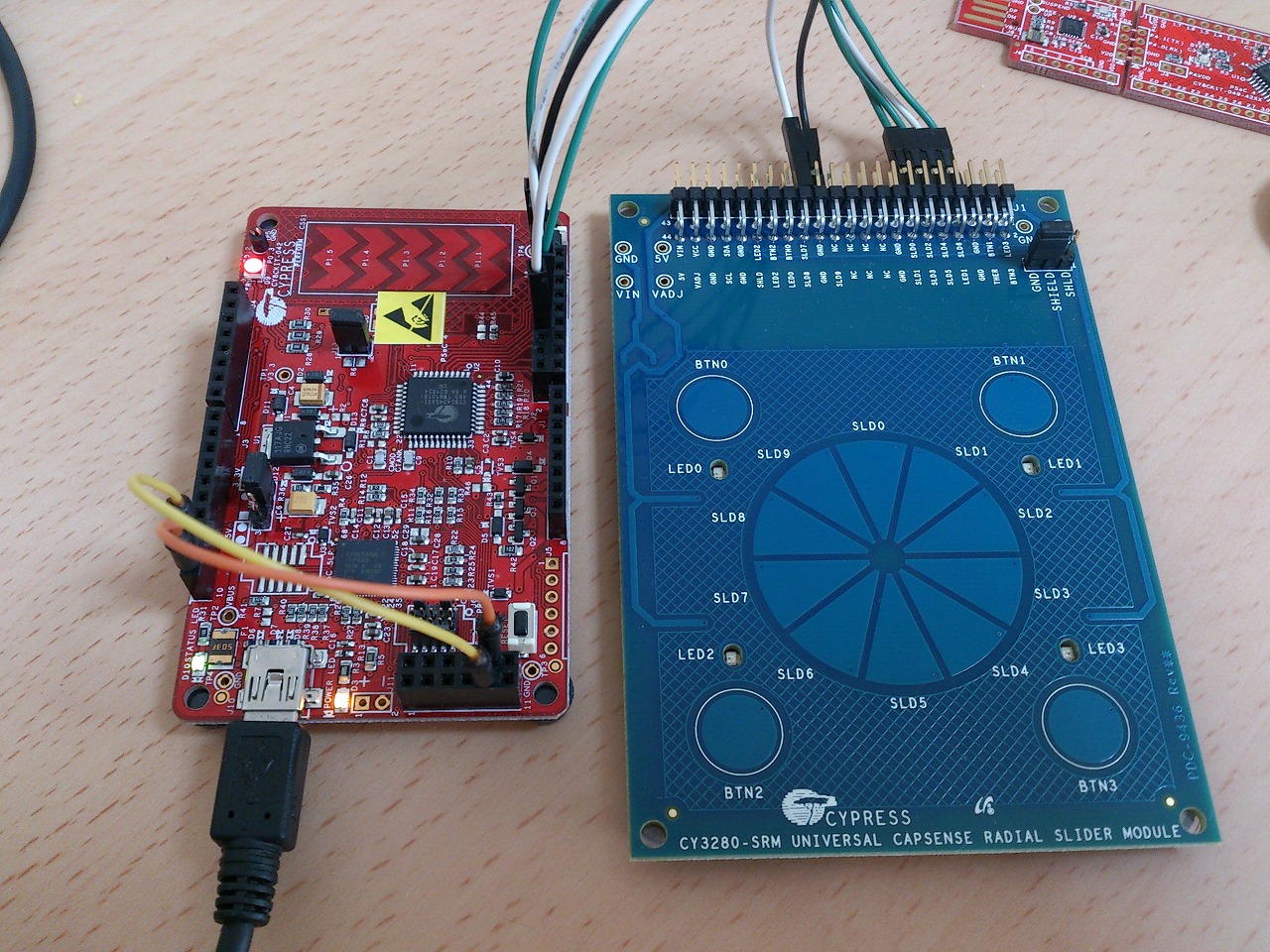
出張中 PSoC4 基板を動かすことなく週末帰宅です。今日は CapSense を使ってみましょうと少しだけ実験です。PSoC4 Pioneer Kit に CapSense 基板を、ジャンプワイヤで接続します。 CapSense に使うポートはどこでもいいのですが、石から 10mm 以内の場所に 560Ω の抵抗を入れるのが推奨されています。

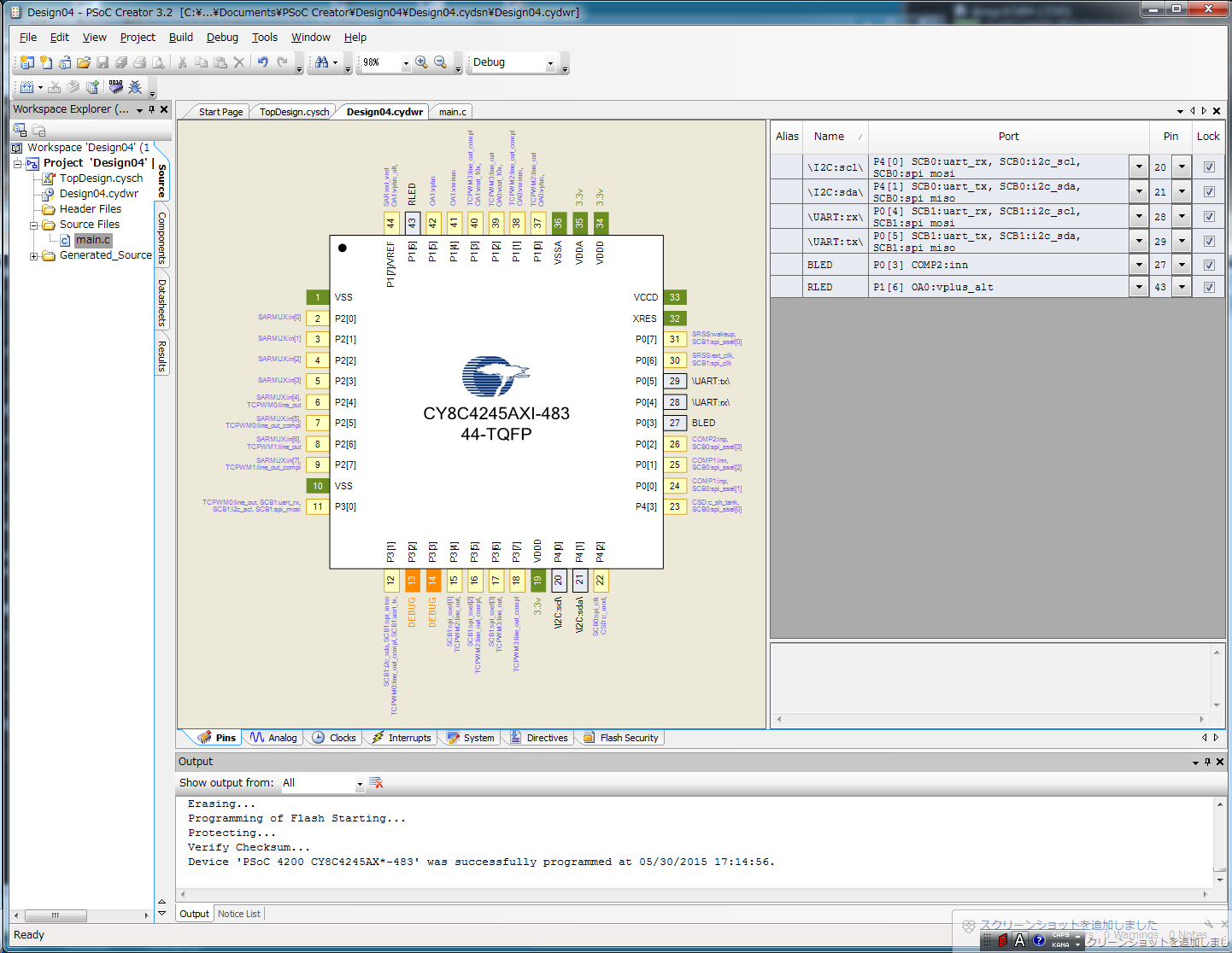
PSoC4 Pioneer Kit も基板のはじっこにスライド式のセンサが配置されていて、それの入力に使う I/O ピンには 560Ω がはいっています。R17から R21 までですな。この I/O ポートは P1_1, P1_2, P1_3, P1_4, P1_5 にアサインされていて、ヘッダにも接続されているので流用可能です。
ということで、別の CapSense 基板ひっぱりだしてきて使います。青い基板の中央にクルクル出来るホイールのパターンが作られています。シルク印刷には、SLD_0 から SLD-9 まで 10個パターンがありますが、基板側の入力が5個だけなので、SLD_0, 2 4 6 8 の5つ配線して使えるかやってみます。
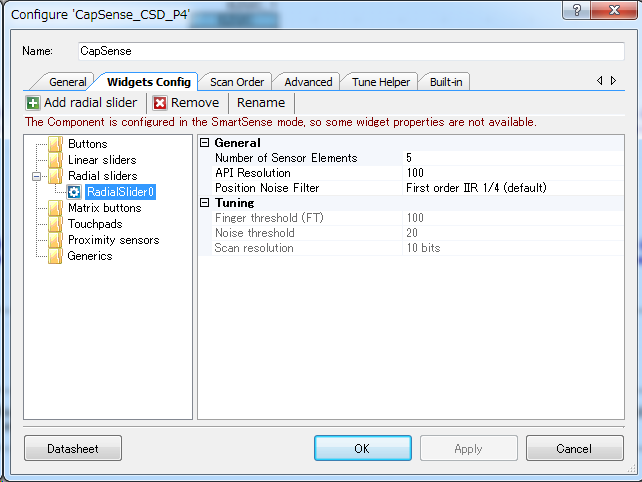
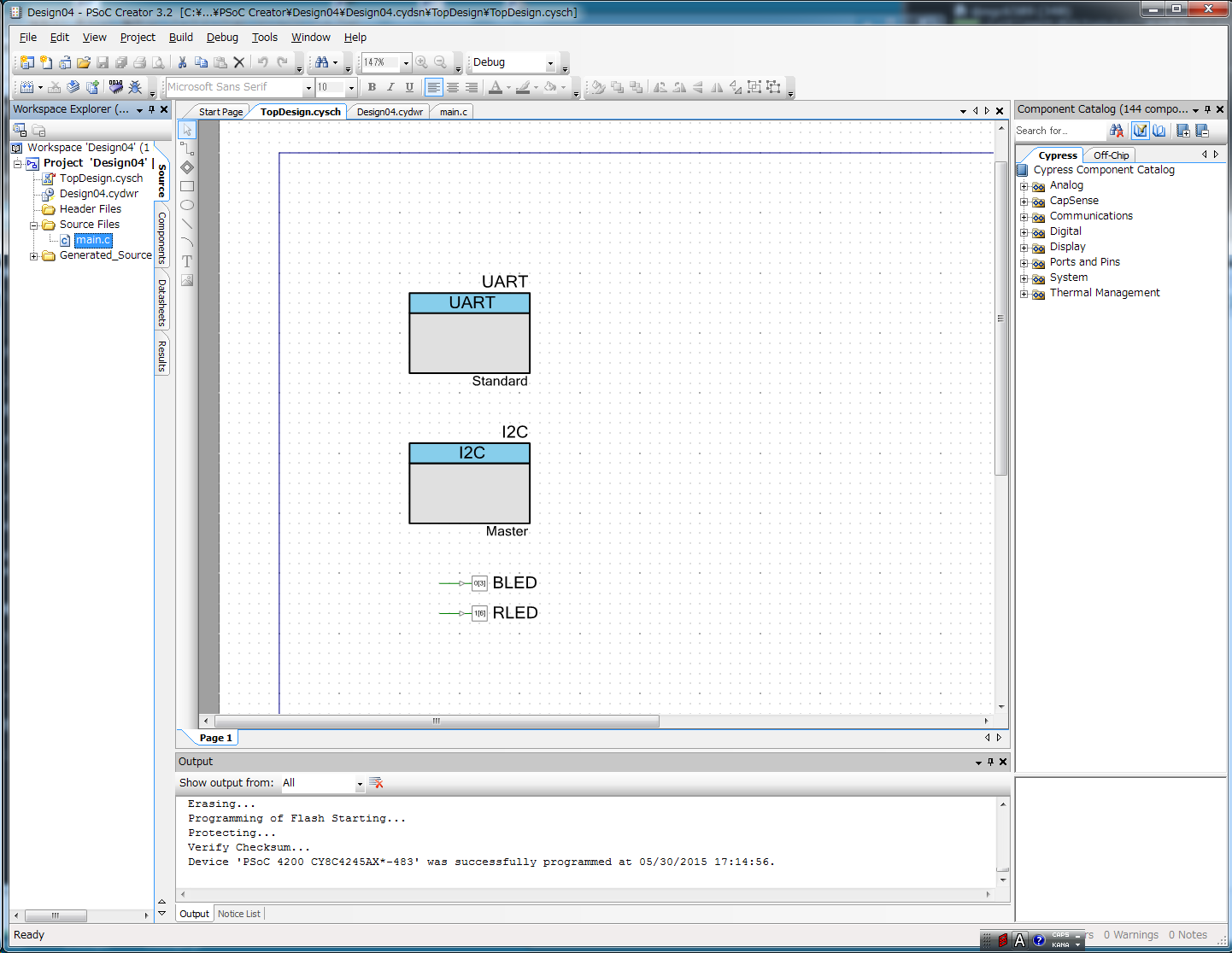
CapSense のエレメント数 5 と API のレゾリューションを 100 。
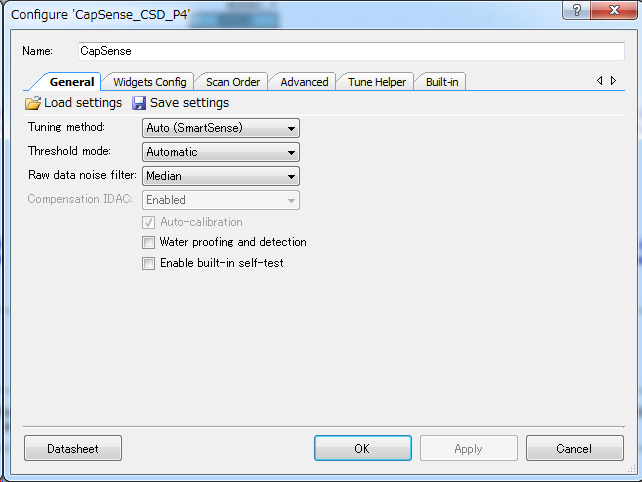
センサーの動作モードは、本当ならマニュアル設定で追い込んで不安定な動作を取り除いたほうが良いですが今回は様子見で Auto 設定でやっています。
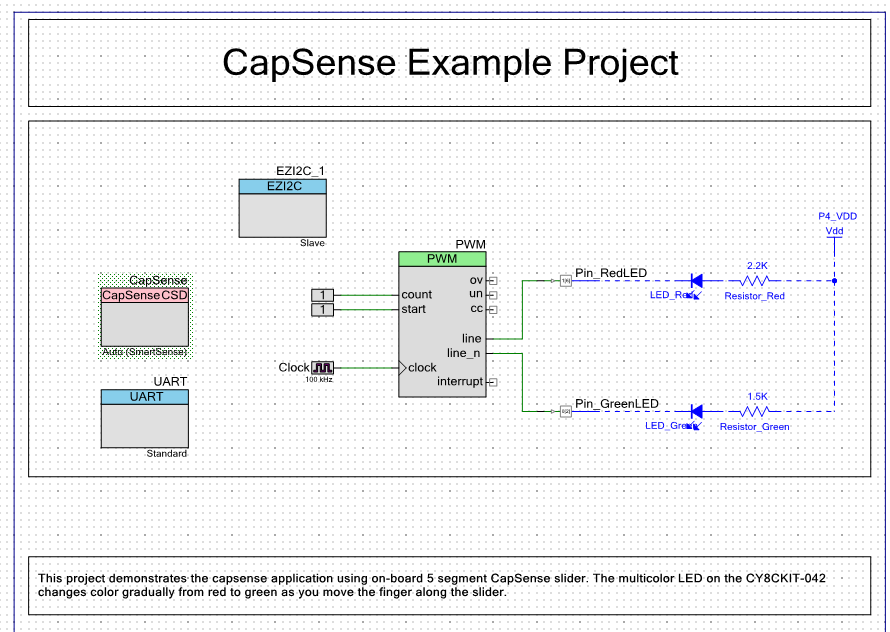
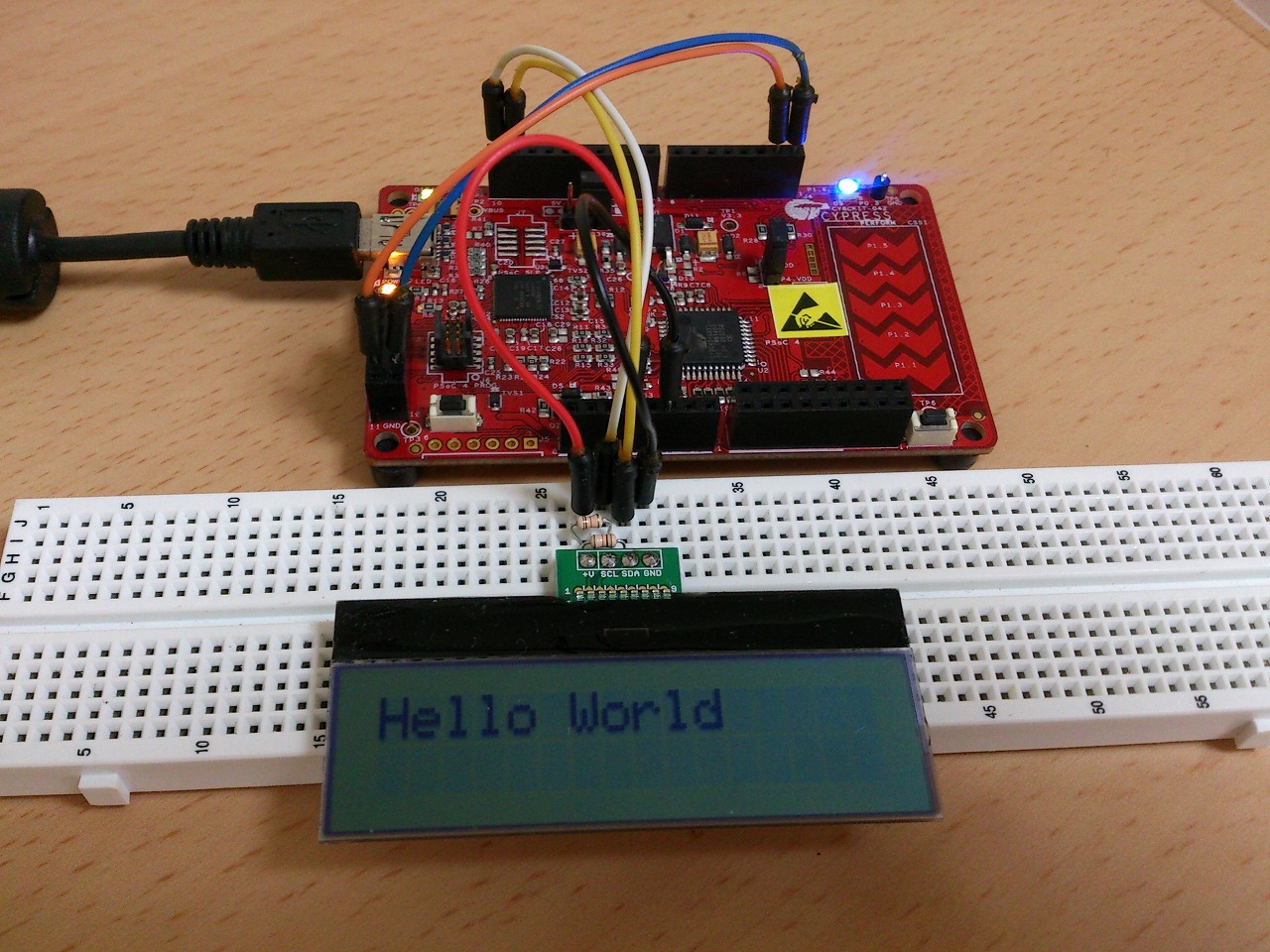
あとは、デバッグ用にシリアルポート追加したりして実験開始。ラジアルスライダの各エレメントというか電極を軽くクリックした状態では、SLD_0 は 0、SLD-2 は 20 と設定画面で指定したレゾリューション 100 をボタン数 5 で割った数値がわりあてられ、ピッタリの値が返ってきました。
0 20 40 60 80 40
次に、右回りにグルグルやってみます。
1 2 3 5 6 7 8 9 10 15 20 22 23 24 25 26 27 28 29 33 35 36 37 40 42 43 44 45 46 47 48 50 51 52 53 54 55 56 57 58 62 63 64 65 66 67 70 71 72 73 74 75 76 77 78 80 85 88 90 91 92 94 95 96 98 99 100
指をグルグルすることで、今触ってる電極と隣の電極の測定値が変化することをうまく処理してるようで100まで出ます。